
Page 58 -
P. 58
โครงการหนังสืออิเล็กทรอนิกส์ด้านการเกษตร เฉลิมพระเกียรติพระบาทสมเด็จพระเจ้าอยู่หัว
48
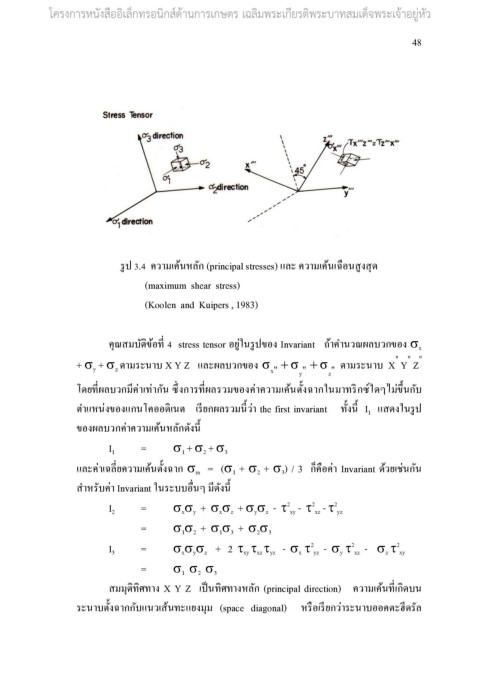
รูป 3.4 ความเค้นหลัก (principal stresses) และ ความเค้นเฉือนสูงสุด
(maximum shear stress)
(Koolen and Kuipers , 1983)
คุณสมบัติข้อที่ 4 stress tensor อยู่ในรูปของ Invariant ถ้าค านวณผลบวกของ
x
" " "
+ + ตามระนาบ X Y Z และผลบวกของ σ σ σ ตามระนาบ X Y Z
"
"
z
y
" x
y
z
โดยที่ผลบวกมีค่าเท่ากัน ซึ่งการที่ผลรวมของค่าความเค้นตั้งฉากในมาทริกซ์ใดๆไม่ขึ้นกับ
ต าแหน่งของแกนโคออดิเนต เรียกผลรวมนี้ว่า the first invariant ทั้งนี้ I 1 แสดงในรูป
ของผลบวกค่าความเค้นหลักดังนี้
I = + +
3
2
1
1
และค่าเฉลี่ยความเค้นตั้งฉาก m = ( + + ) / 3 ก็คือค่า Invariant ด้วยเช่นกัน
3
2
1
ส าหรับค่า Invariant ในระบบอื่นๆ มีดังนี้
I = + + - - - 2 yz
2
2
y
xz
z
xy
2
y
x
x
z
= + +
1 2 1 3 2 3
2
I 3 = + 2 - - - 2 xy
2
y
z
y
z
xz
x
x
yz
xy xz yz
=
1 2 3
สมมุติทิศทาง X Y Z เป็นทิศทางหลัก (principal direction) ความเค้นที่เกิดบน
ระนาบตั้งฉากกับแนวเส้นทะแยงมุม (space diagonal) หรือเรียกว่าระนาบออคตะฮีดรัล