
Page 149 -
P. 149
โครงการหนังสืออิเล็กทรอนิกส์ เฉลิมพระเกียรติสมเด็จพระเทพรัตนราชสุดาฯ สยามบรมราชกุมารี
140
5.2.1 Nearest Neighbourhood Interpolation
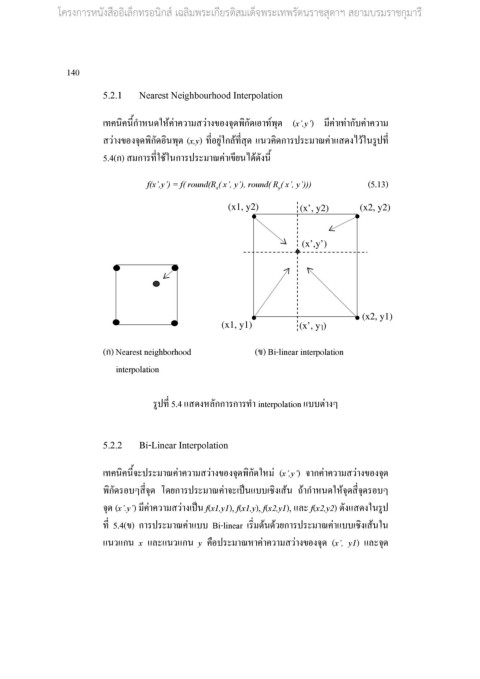
เทคนิคนี้กําหนดใหคาความสวางของจุดพิกัดเอาทพุต (x’,y’) มีคาเทากับคาความ
สวางของจุดพิกัดอินพุต (x,y) ที่อยูใกลที่สุด แนวคิดการประมาณคาแสดงไวในรูปที่
5.4(ก) สมการที่ใชในการประมาณคาเขียนไดดังนี้
f(x’,y’) = f( round(R ( x’, y’), round( R ( x’, y’))) (5.13)
y
x
(x1, y2) (x’, y2) (x2, y2)
(x’,y’)
(x2, y1)
(x1, y1) (x’, yๅ)
(ก) Nearest neighborhood (ข) Bi-linear interpolation
interpolation
รูปที่ 5.4 แสดงหลักการการทํา interpolation แบบตางๆ
5.2.2 Bi-Linear Interpolation
เทคนิคนี้จะประมาณคาความสวางของจุดพิกัดใหม (x’,y’) จากคาความสวางของจุด
พิกัดรอบๆสี่จุด โดยการประมาณคาจะเปนแบบเชิงเสน ถากําหนดใหจุดสี่จุดรอบๆ
จุด (x’.y’) มีคาความสวางเปน f(x1,y1), f(x1,y), f(x2,y1), และ f(x2,y2) ดังแสดงในรูป
ที่ 5.4(ข) การประมาณคาแบบ Bi-linear เริ่มตนดวยการประมาณคาแบบเชิงเสนใน
แนวแกน x และแนวแกน y คือประมาณหาคาความสวางของจุด (x’, y1) และจุด