
Page 147 -
P. 147
โครงการหนังสืออิเล็กทรอนิกส์ เฉลิมพระเกียรติสมเด็จพระเทพรัตนราชสุดาฯ สยามบรมราชกุมารี
138
บอยครั้งจุดพิกัดใหม (x’,y’) ที่ไดจากการแปลงนั้นจะเปนเลขทศนิยม จุดพิกัดใหม
มักจะไมตกลงตําแหนงใดๆที่มีอยูในภาพตนฉบับ ทั้งนี้เนื่องจากจุดพิกัดของภาพ
ดิจิตอลถูกกําหนดใหมีตําแหนงเปนเลขจํานวนเต็มแบบไมตอเนื่อง เชน ตําแหนง (2,
18) (3, 46) เปนตน โดยทั่วไปตําแหนงจุดพิกัดใหมที่คํานวณไดจะถูกจับคูกับจุดพิกัด
ของภาพตนฉบับที่ใกลเคียงที่สุดดวยสมการที่ (5.11)
[x , ' ] ' y = [round (T x (x , y )),round (T y (x , y ))] (5.11)
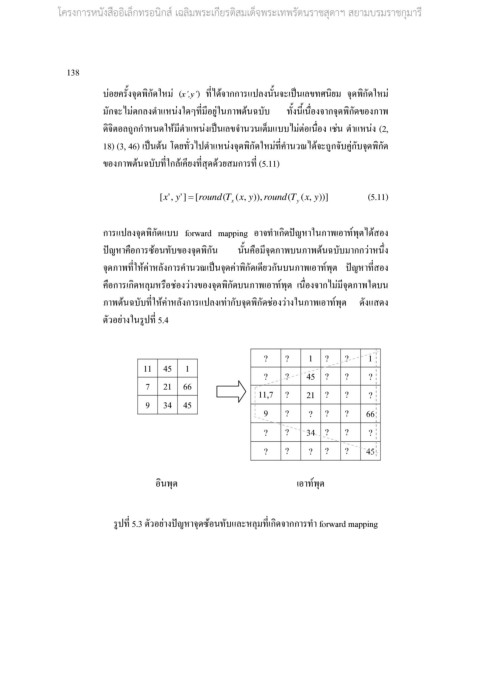
การแปลงจุดพิกัดแบบ forward mapping อาจทําเกิดปญหาในภาพเอาทพุตไดสอง
ปญหาคือการซอนทับของจุดพิกัน นั้นคือมีจุดภาพบนภาพตนฉบับมากกวาหนึ่ง
จุดภาพที่ใหคาหลังการคํานวณเปนจุดคาพิกัดเดียวกันบนภาพเอาทพุต ปญหาที่สอง
คือการเกิดหลุมหรือชองวางของจุดพิกัดบนภาพเอาทพุต เนื่องจากไมมีจุดภาพใดบน
ภาพตนฉบับที่ใหคาหลังการแปลงเทากับจุดพิกัดชองวางในภาพเอาทพุต ดังแสดง
ตัวอยางในรูปที่ 5.4
? ? 1 ? ? 1
11 45 1
7 21 66 ? ? 45 ? ? ?
9 34 45 11,7 ? 21 ? ? ?
9 ? ? ? ? 66
? ? 34 ? ? ?
? ? ? ? ? 45
อินพุต เอาทพุต
รูปที่ 5.3 ตัวอยางปญหาจุดซอนทับและหลุมที่เกิดจากการทํา forward mapping