
Page 190 -
P. 190
โครงการหนังสืออิเล็กทรอนิกส์ เฉลิมพระเกียรติสมเด็จพระเทพรัตนราชสุดาฯ สยามบรมราชกุมารี
181
ภายในภาพ ทั้งนี้เนื่องจากสัญญาณรบกวนภายในภาพมักจะเปนสวนผสมยานความถี่
สูงของภาพ
ตัวกรองความถี่ต่ําผานแบบอุดมคติ (Ideal Lowpass Filters - ILPF)
ตัวกรองความถี่ต่ําแบบอุดมคติจะมีการเปลี่ยนผานบริเวณความถี่คัตออฟแบบ
เฉียบพลันดังแสดงในรูปที่ 6.16(ก) คือ จะยอมใหสัญญาณที่มีความถี่ต่ํากวา
ความถี่คัตออฟผานเทานั้น สัญญาณที่มีความถี่ที่สูงกวาคาความถี่คัตออฟไมสามารถ
ผานได เมื่อพิจารณาตัวกรองนี้ในโดเมนความถี่ คาความถี่คัตออฟจะสามารถคํานวฯ
ไดจากระยะทางหางจากจุดศูนยกลางของแกนความถี่แทน ทําใหสามารถเขียนตัว
กรอง H(u,v) แบบอุดมคติในรูปของตัวแปรระยะทางไดดังสมการตอไปนี้
⎧1 if D(u,v)≤ D 0
H (u , ) v = ⎨ (6.27)
⎩ 0 if D(u,v) > D 0
โดย D และ D(u,v) เปนระยะทางแบบวงกลมจากจุดศูนยกลางของตัวกรอง โดย
0
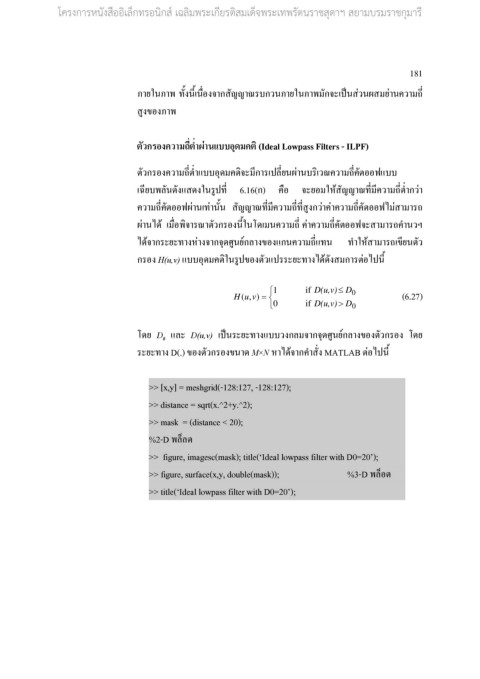
ระยะทาง D(.) ของตัวกรองขนาด M×N หาไดจากคําสั่ง MATLAB ตอไปนี้
>> [x,y] = meshgrid(-128:127, -128:127);
>> distance = sqrt(x.^2+y.^2);
>> mask = (distance < 20);
%2-D พล็ลต
>> figure, imagesc(mask); title(‘Ideal lowpass filter with D0=20’);
>> figure, surface(x,y, double(mask)); %3-D พล็อต
>> title(‘Ideal lowpass filter with D0=20’);