
Page 156 -
P. 156
โครงการหนังสืออิเล็กทรอนิกส์ด้านการเกษตร เฉลิมพระเกียรติพระบาทสมเด็จพระเจ้าอยู่หัว
การจัดเก็บขอมูลที่เอื้ออํานวยตอการวิเคราะหดานการเชื่อมตอจะตองจัดเก็บตามระบบโครงสรางแบบ
ความสัมพันธ (ดูเพิ่มเติมในบทที่ 2 หัวขอที่ 2.2.4 เรื่องระบบโครงสรางแบบความสัมพันธ) จะเก็บ
ขอมูลอรรถาธิบายแยกเปนอิสระจากขอมูลโทโพโลยี เชน จะมีขอมูลชวงถนน (จุดเริ่มตน จุดสิ้นสุด
ความยาวชวงถนน ความเร็วที่จํากัด สภาพถนน และอื่น ๆ )
7.5.2 การดําเนินรอบตัววัตถุ
กระบวนการดําเนินรอบตัววัตถุมีของโครงสรางแบบเวกเตอรโดยปกติจะพิจาณาสาลักษณที่อยู
ใกลเคียงกันที่สุดอยูแลว เชน บริเวณรอบ ๆ อาณาเขตของอําเภอที่สนใจมีอําเภออะไรอยูรอบ ๆ บาง
หรือบริเวณใกล ๆ ถนนในระยะ 100 เมตรจากเขตทางหลวงมีสิ่งปลูกสรางอะไรบาง ซึ่งเมื่อเทียบกับ
โครงสรางแบบแรสเตอรจะมีหลากหลายรูปแบบกวาโครงรางแบบเวกเตอรเพราะการวิเคราะหพื้นที่จะ
ไมมีขอบเขตที่ชัดเจนจะตองมีการระบุขอบเขตรอบตัววัตถุใหชัด การทํา filter กับภาพเปนตัวอยางที่
ชัดเจนที่สุดเพราะการทํา filter เปนหลักการพื้นฐานเพื่อที่จะคํานวณคาสถิติเกี่ยวกับภาพซึ่งจะมีการ
พิจารณาถึงจํานวนจุดภาพที่จะวิเคราะหหางจากจุดศูนยกลางที่จุดภาพและทิศทางพิจารณาแบบไหน
ตัวอยางการกําหนดขอบเขต filter สามารถเปนไปไดหลายขนาด (โดยปกตินิยมจํานวนคี่) เชน 3x3
5x5 7x7 9x9 และอื่น ๆ และการดําเนินการรอบตัววัตถุ จะตองมีการกําหนดทิศทางรอบตัวดวยวาจะ
เปนแบบไหนตัวอยางดังแสดงในรูป รูปที่ 7.16 ก. เปนการดําเนินการรอบตัวขนาด 3x3 แบบ 4 ทิศทาง
และ ข. เปนการดําเนินการแบบ 8 ทิศทางรอบตัว จะสงผลใหเสนตรงออกมามีรูปลักษณที่ตางกัน และ
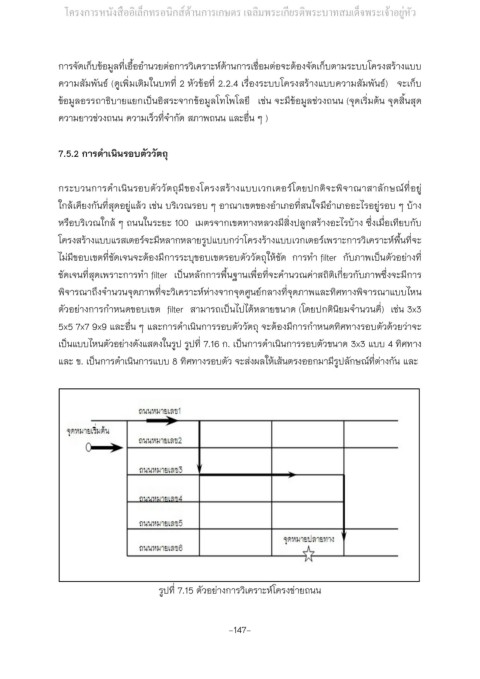
รูปที่ 7.15 ตัวอยางการวิเคราะหโครงขายถนน
-147-